| Projets tuteurés - L3Pro - Partie Vision |
| Pour rappel : la validation de l'enseignement est faite sur projet. Il est attendu des binômes de programmer les robots 3pi (https://www.pololu.com/product/975) afin de réaliser la première mission décrite dans ce support. Ici, vous trouverez une suite d'exemples vus en cours et choisis dans afin de vous guider vers la réalisation de la partie "vision du robot" (repérer le robot et sa cible à partir d'images prises en vue de dessus). | |
| Supports & liens | |
|
Site de la bibliothèque OpenCV, OpenCV (Open Source Computer Vision Library) est une bibliothèque de vision par ordinateur (traitement d'images et extraction d'information) : Nous utiliserons OpenCV aussi bien pour charger des images, récupérer des flux vidéo que gérer l'interface graphique, utiliser et/ou programmer des filtres. |
|
| Exemples utilisés en cours | |
 |
Chargement d'une image puis affichage : OCVExample-01.tgz |
 |
Chargement d'une image, mise en niveaux de gris par calcul de luminance (fait pixel par pixel) puis affichage : OCVExample-02.tgz |
 |
Prise en charge d'un device de capture, récupération des images, transformation en niveau de gris 8bits puis application d'un flou Gaussien (fonctionnalités OpenCV) : OCVExample-03.tgz |
 |
Utilisation de l'historique pour renforcer la probabilité de détection : OCVExample-06.tgz |
| Exercices | |
| Exercice 1 (pour le 11 février 2015) | |
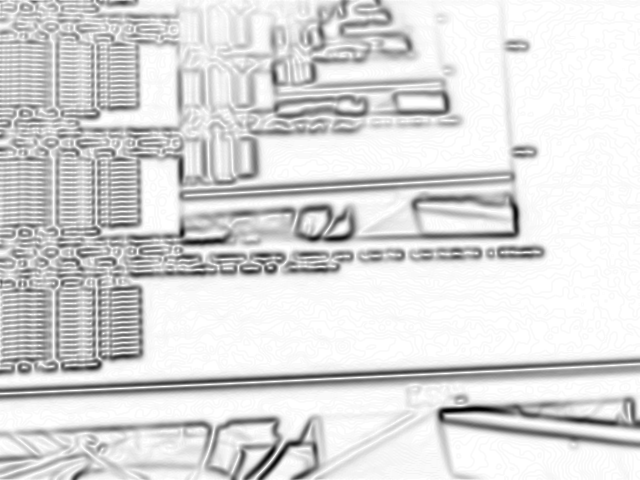 |
FACILE : ajoutez un sobel à l'exemple 3 ci-dessus. |
| Exercice 2 (pour le 04 mar 2015) | |
|
|
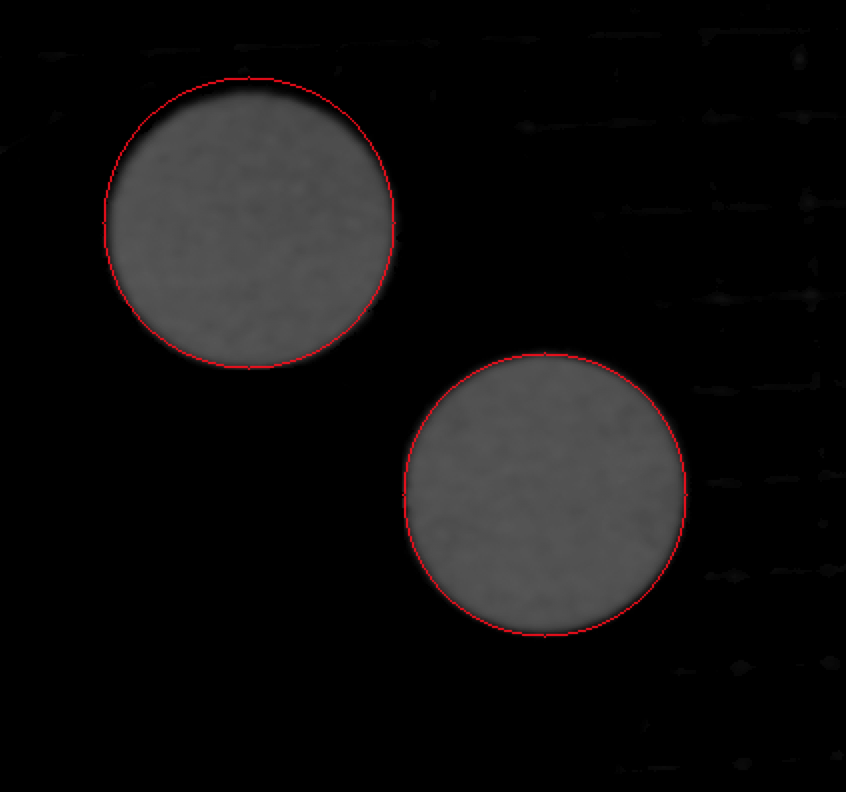
Utilisez la fonction cvHoughCircles afin de détecter les cercles du pattern collé au robot 3pi (voir le doc présentant le pattern en dernière page ici). Afin de faire une détection par gamme de chrominance, inspirez-vous de ce code, laissant passer les tons "verts" et étendez-le aux autres tons. |
Farès Belhadj |
![]()